1
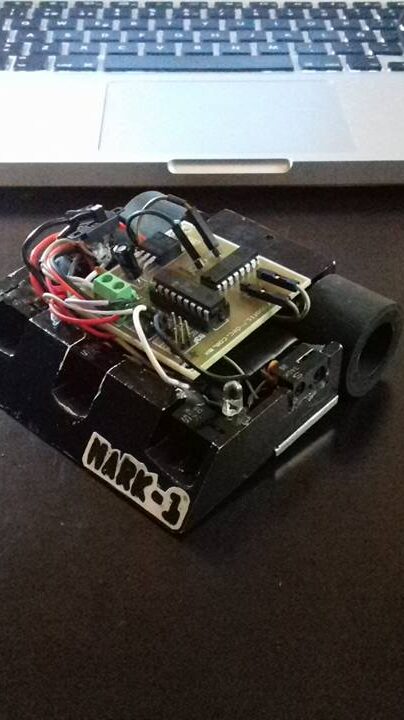
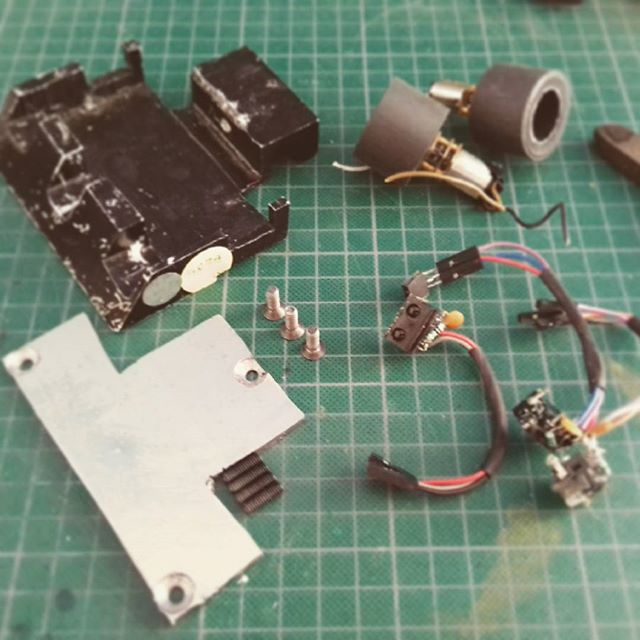
MINISUMO – «MARK 1»
Project developed for the Robomatrix minisumo competition. This robot consisted of 3 stages of development:
1- Robot without sensors, the fighting principle is based on the time and position of the other robot, if it couldn’t get it out the ring at the first time, it lost.
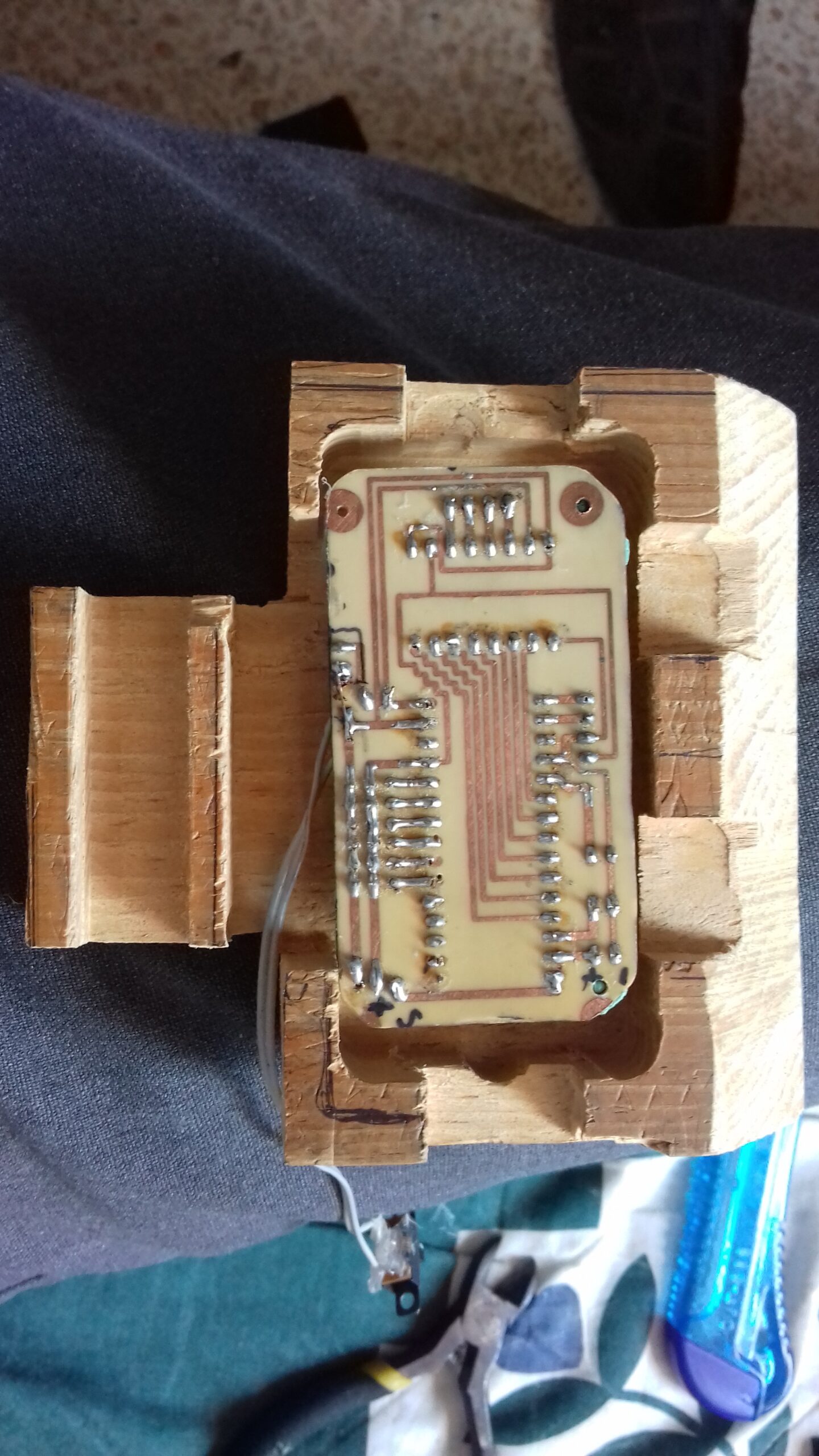
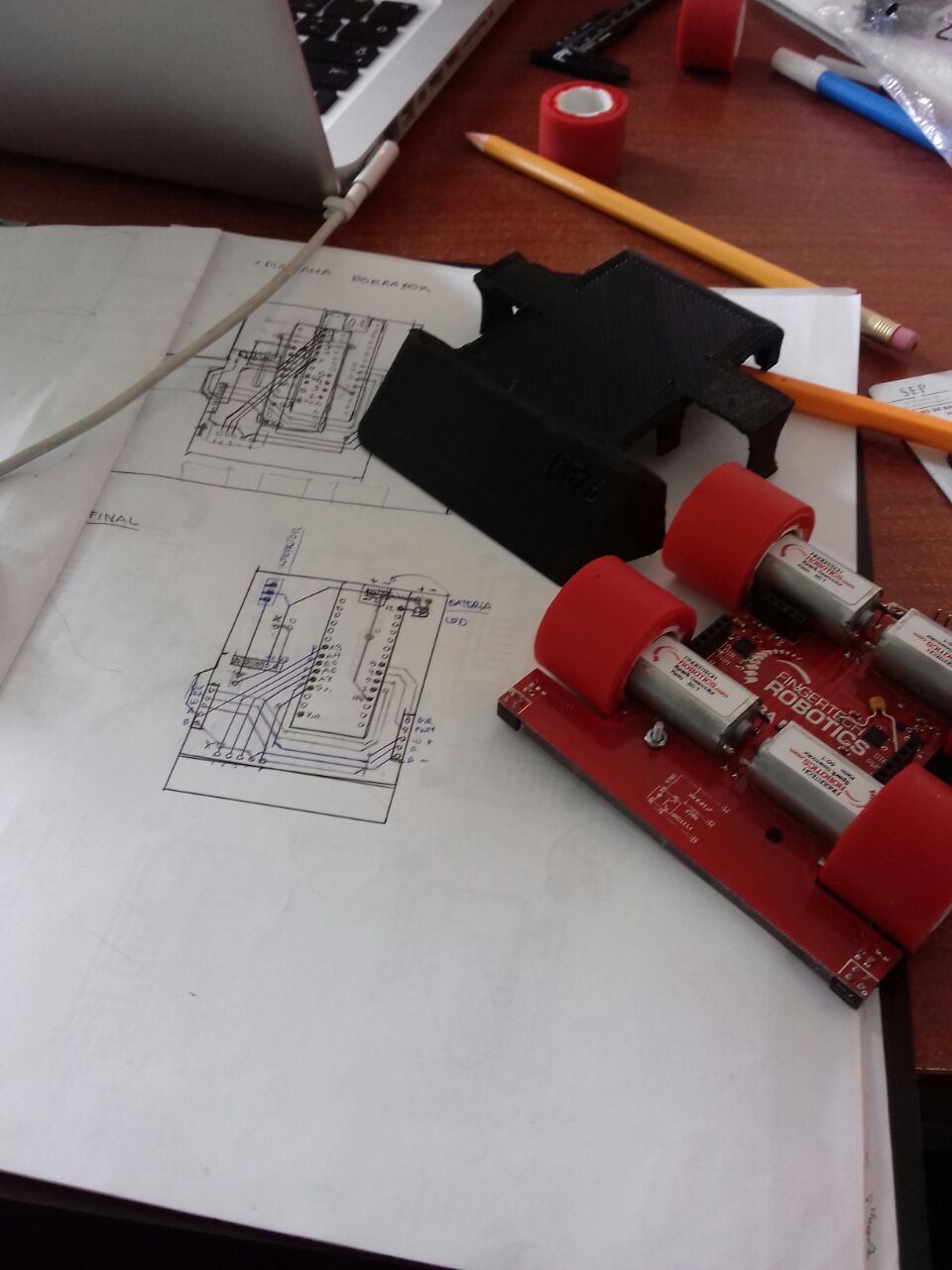
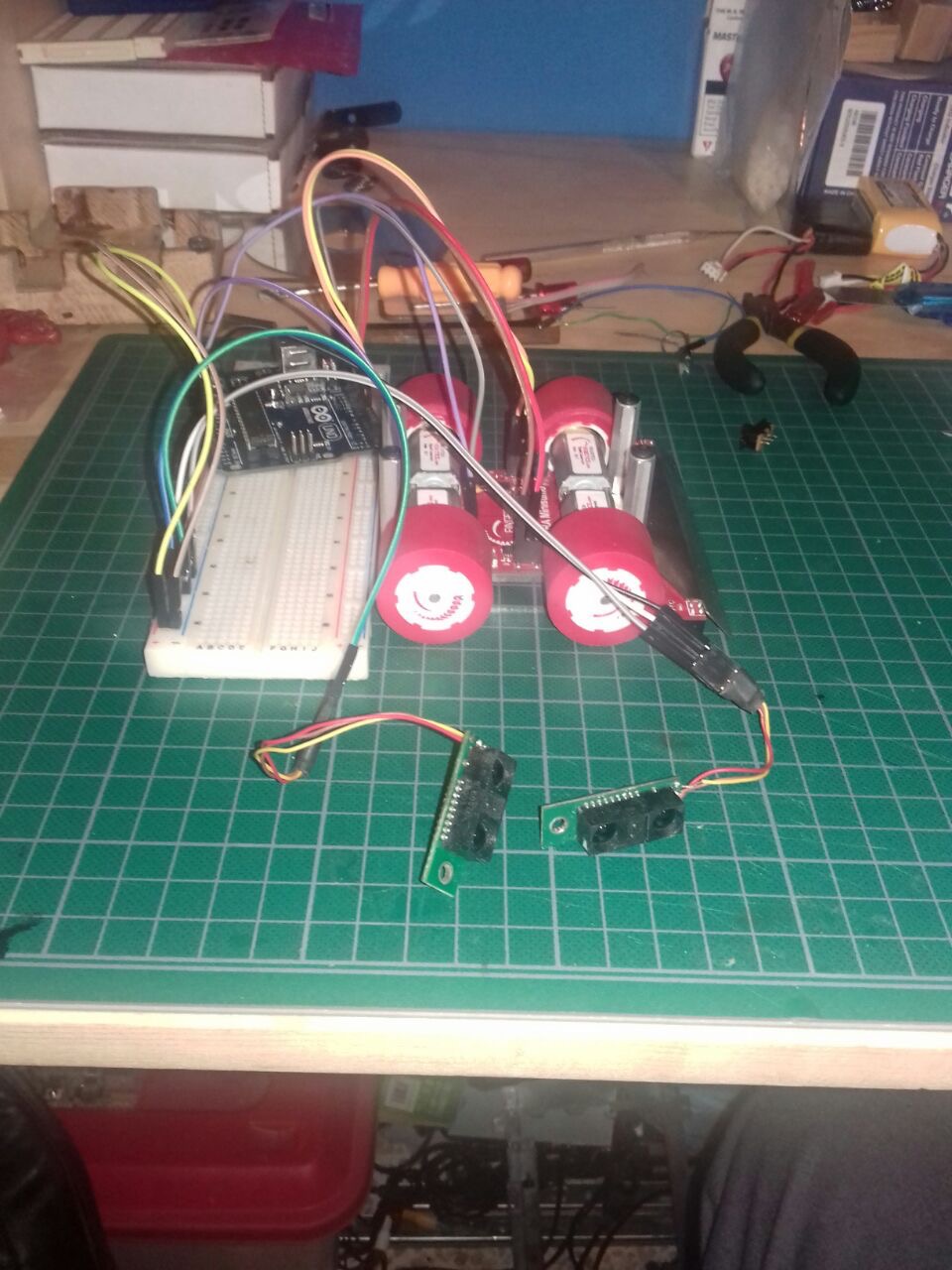
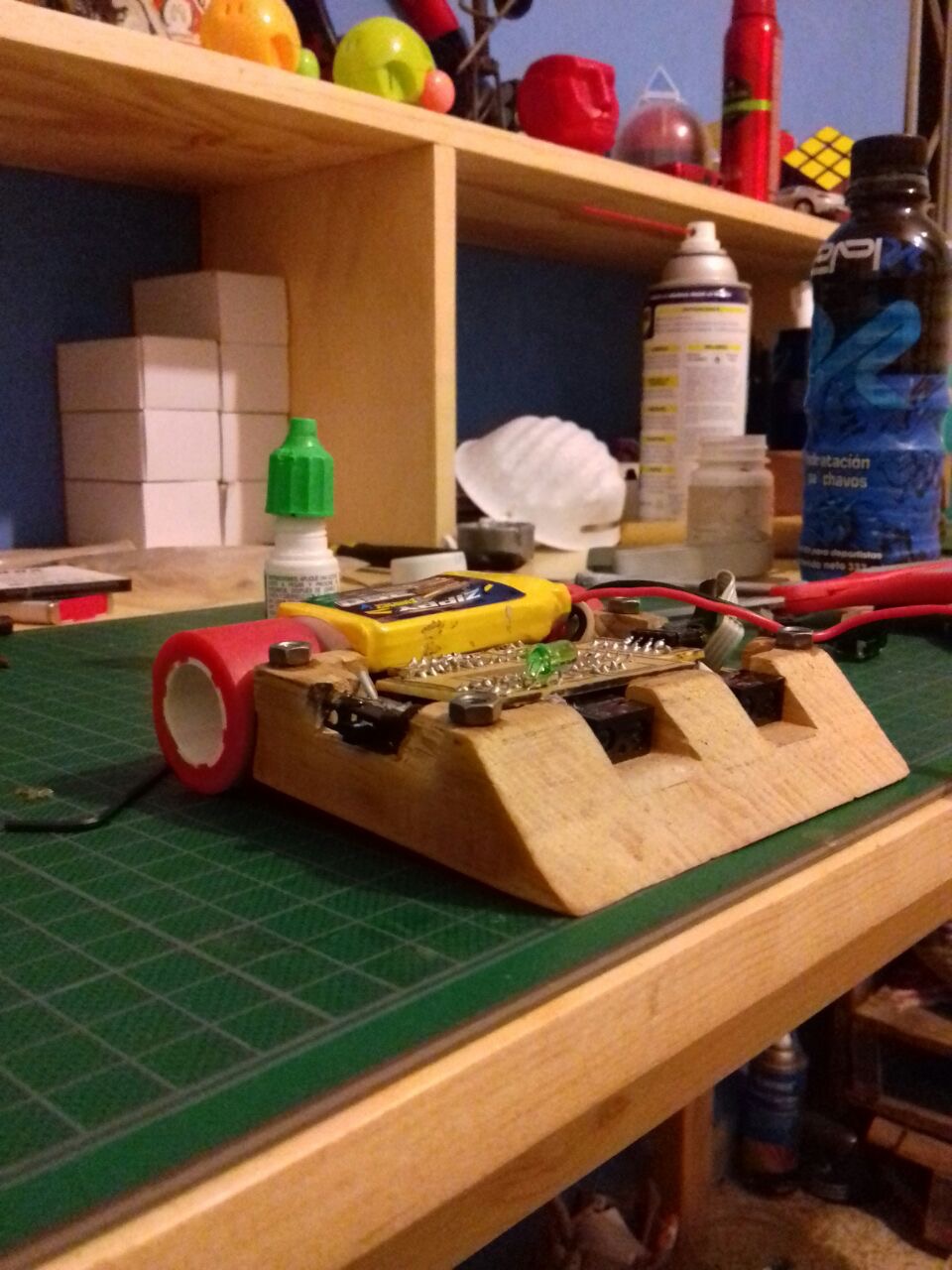
2- The second prototype was made by milling a wooden plate, in this model sensors were already included .
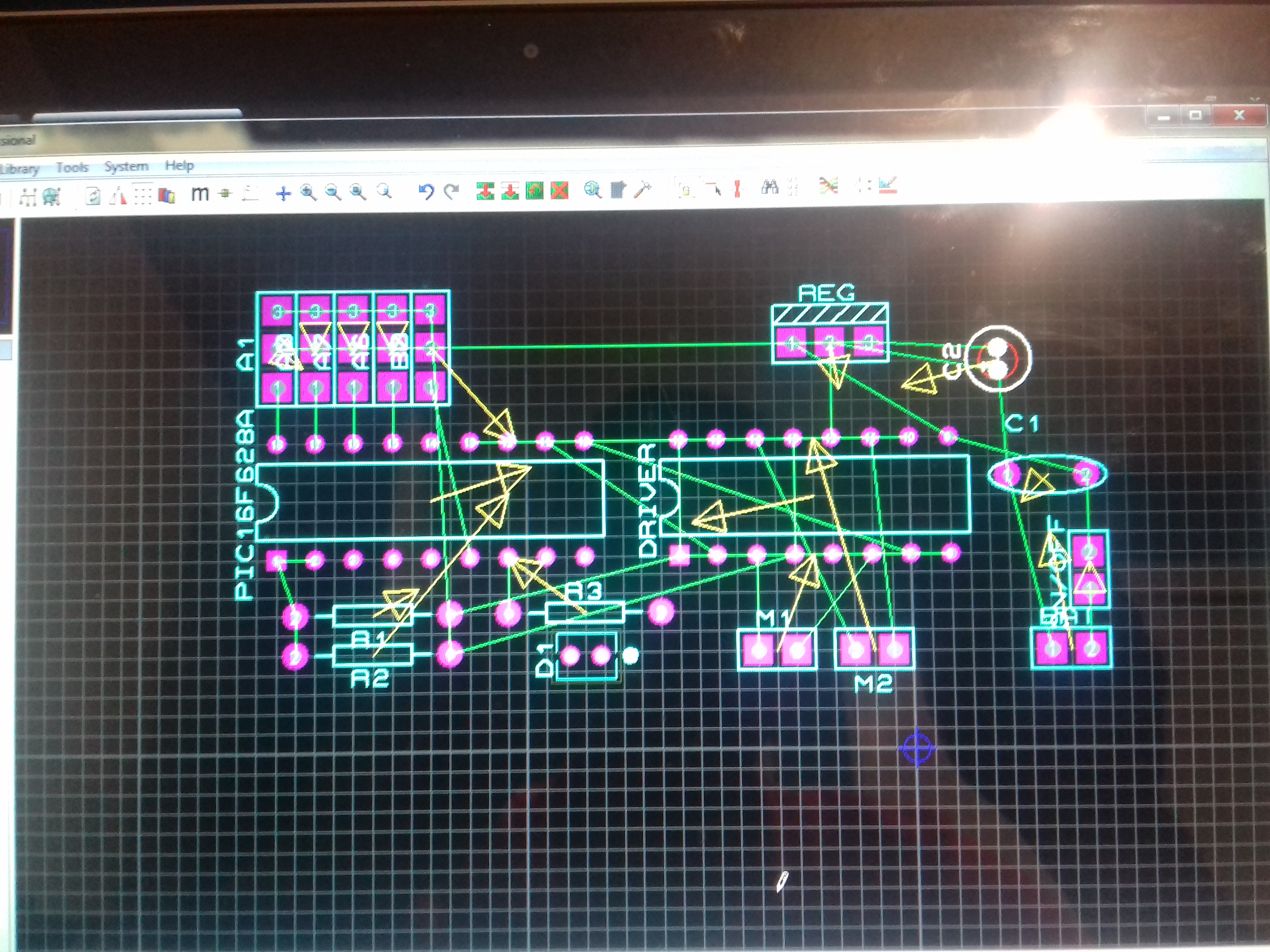
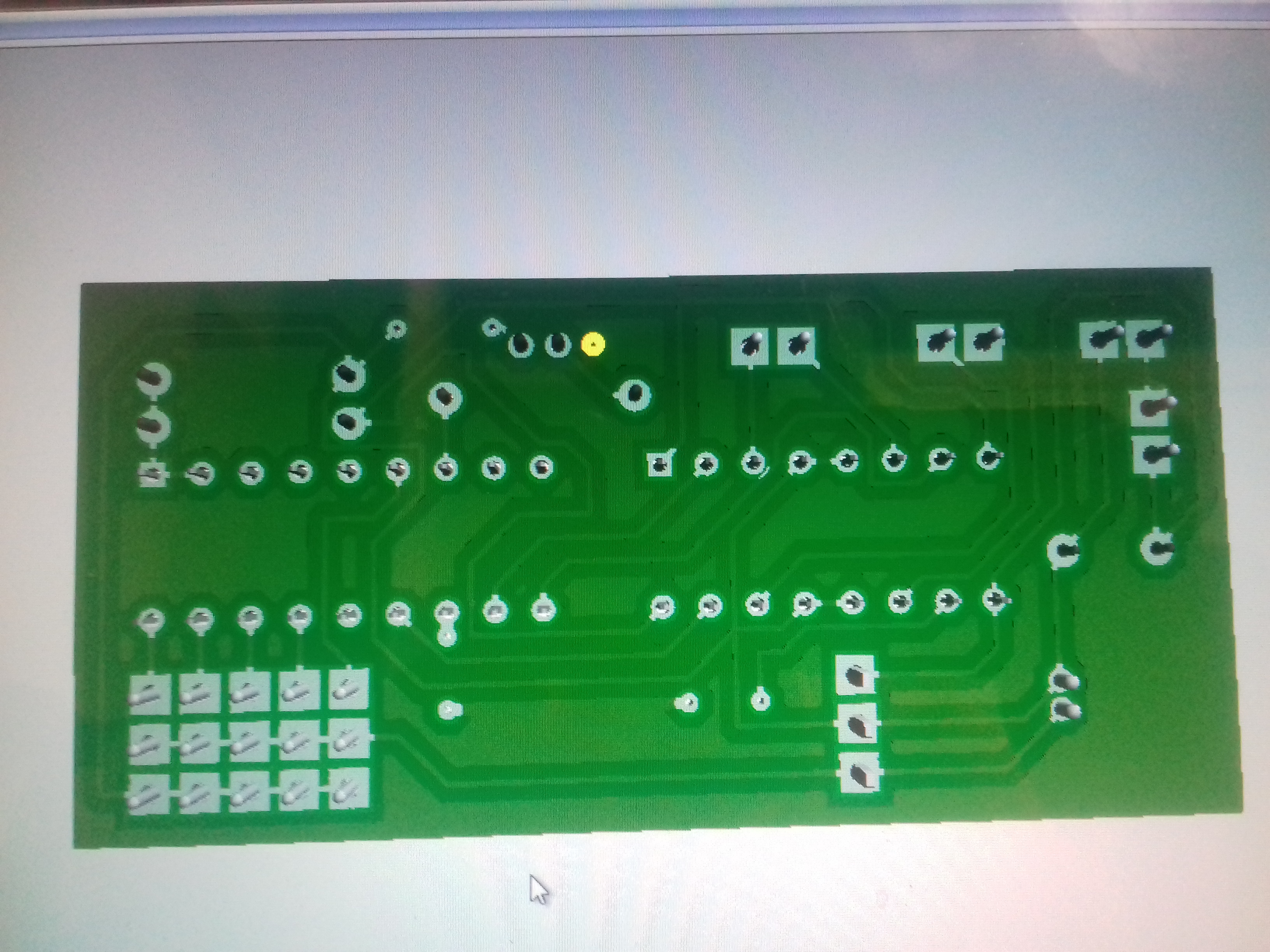
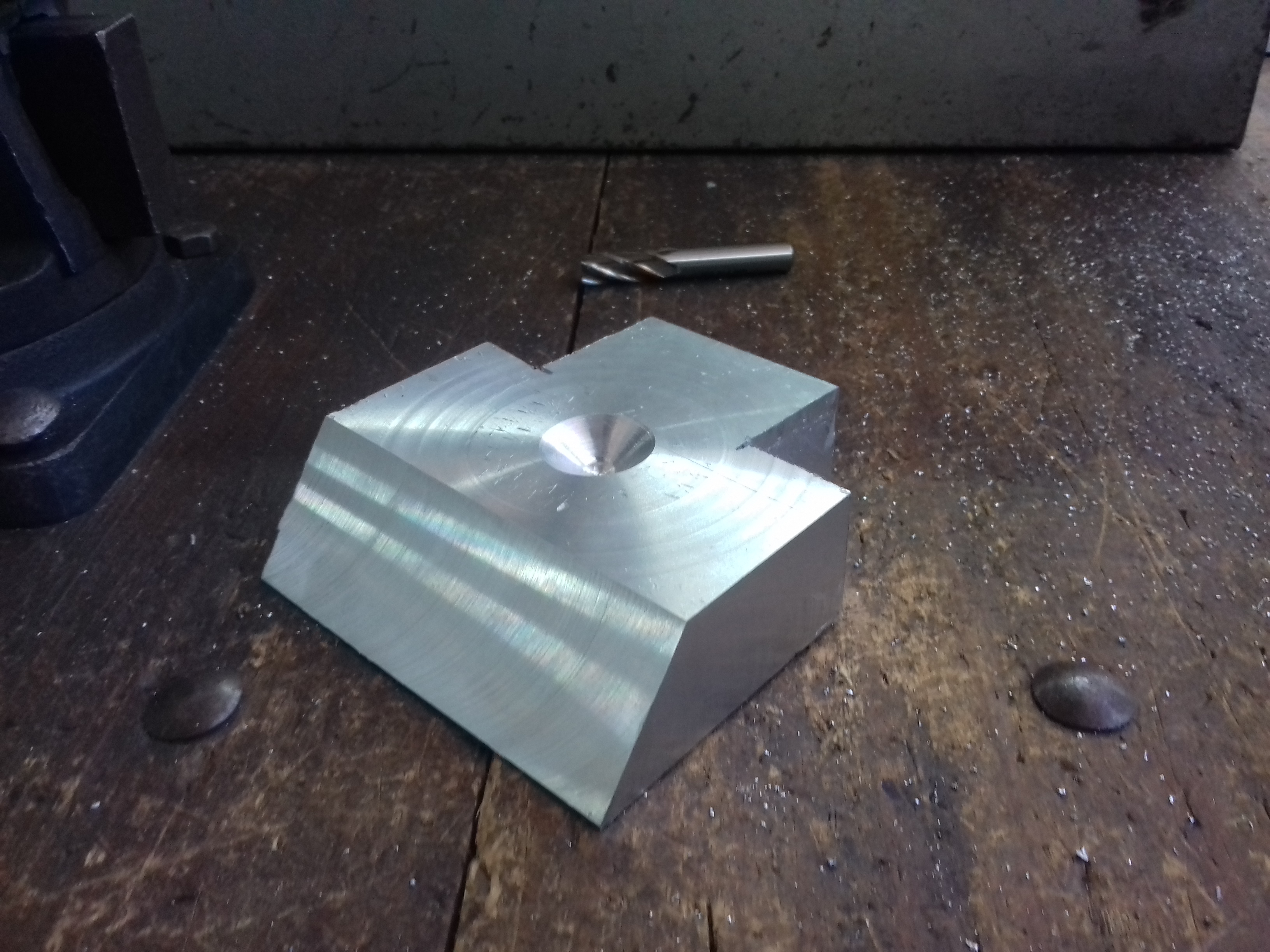
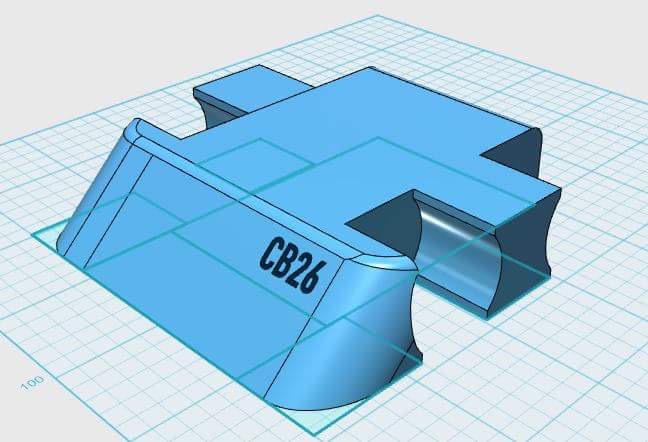
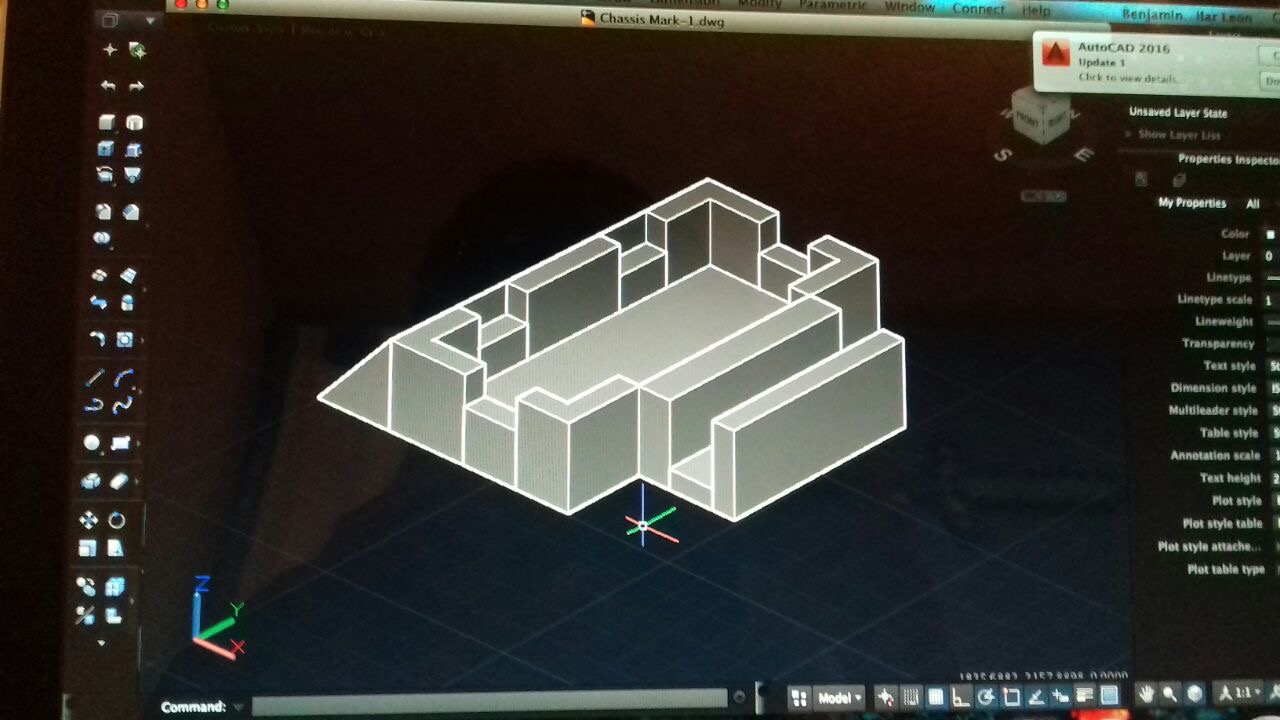
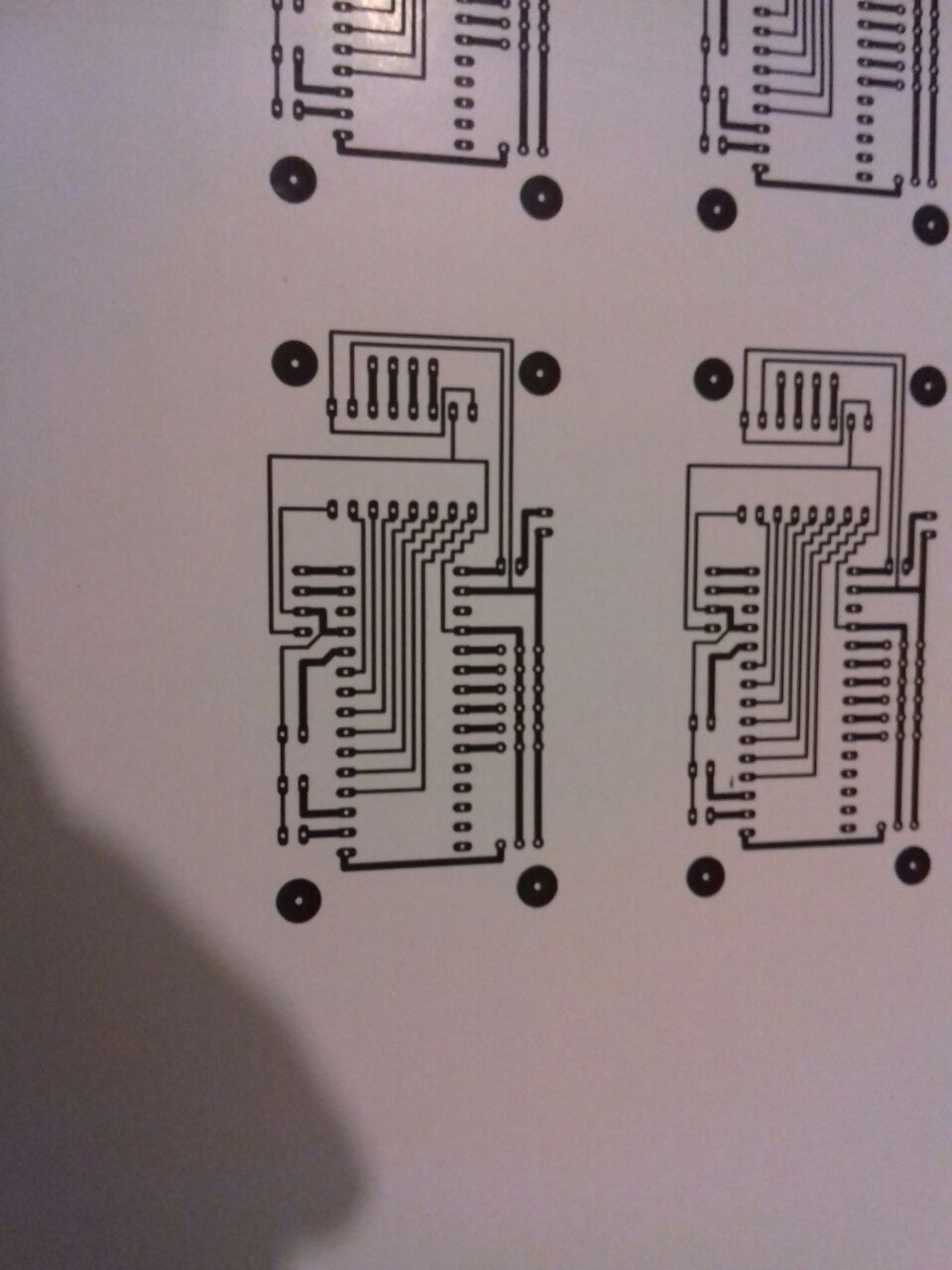
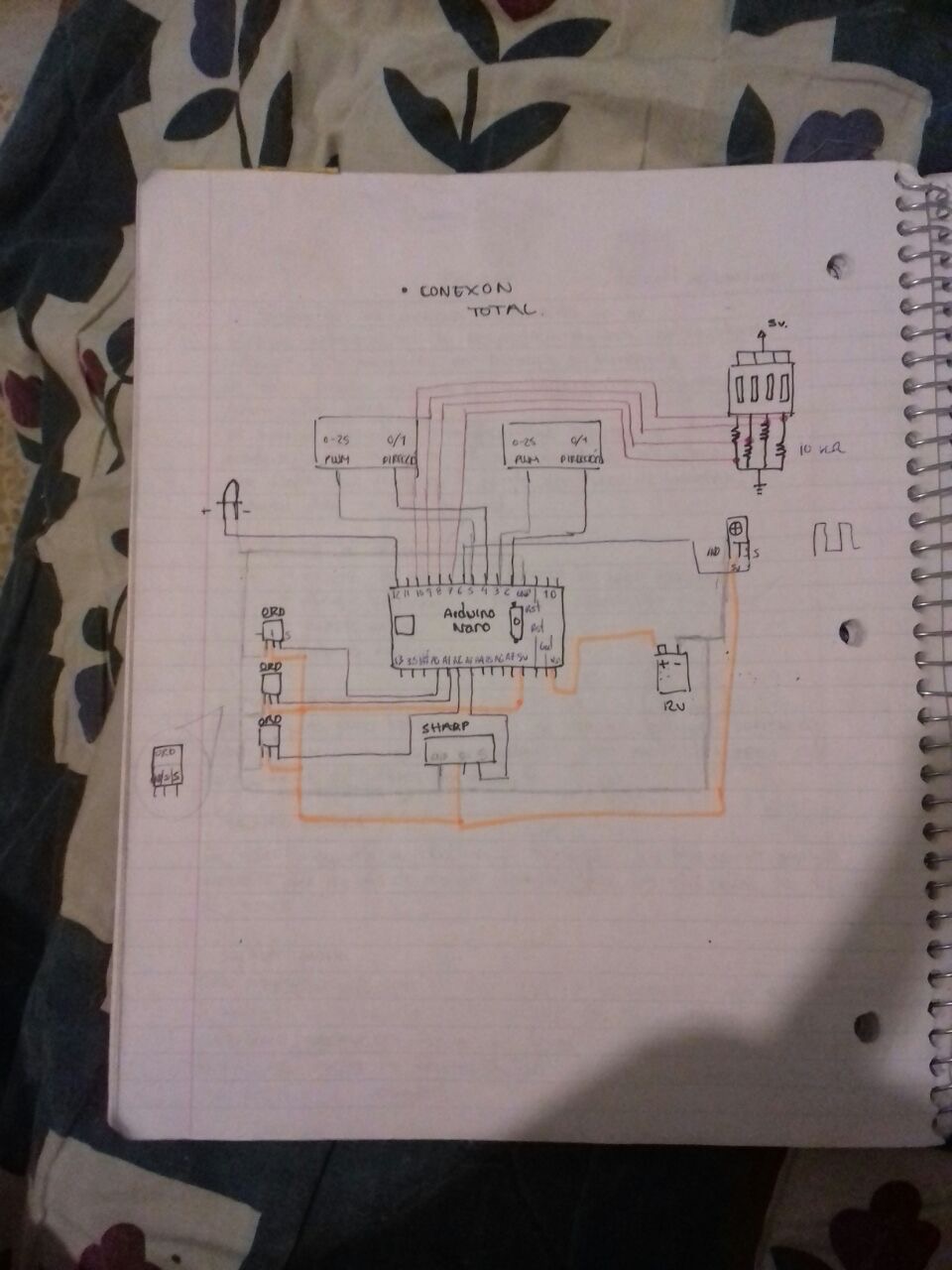
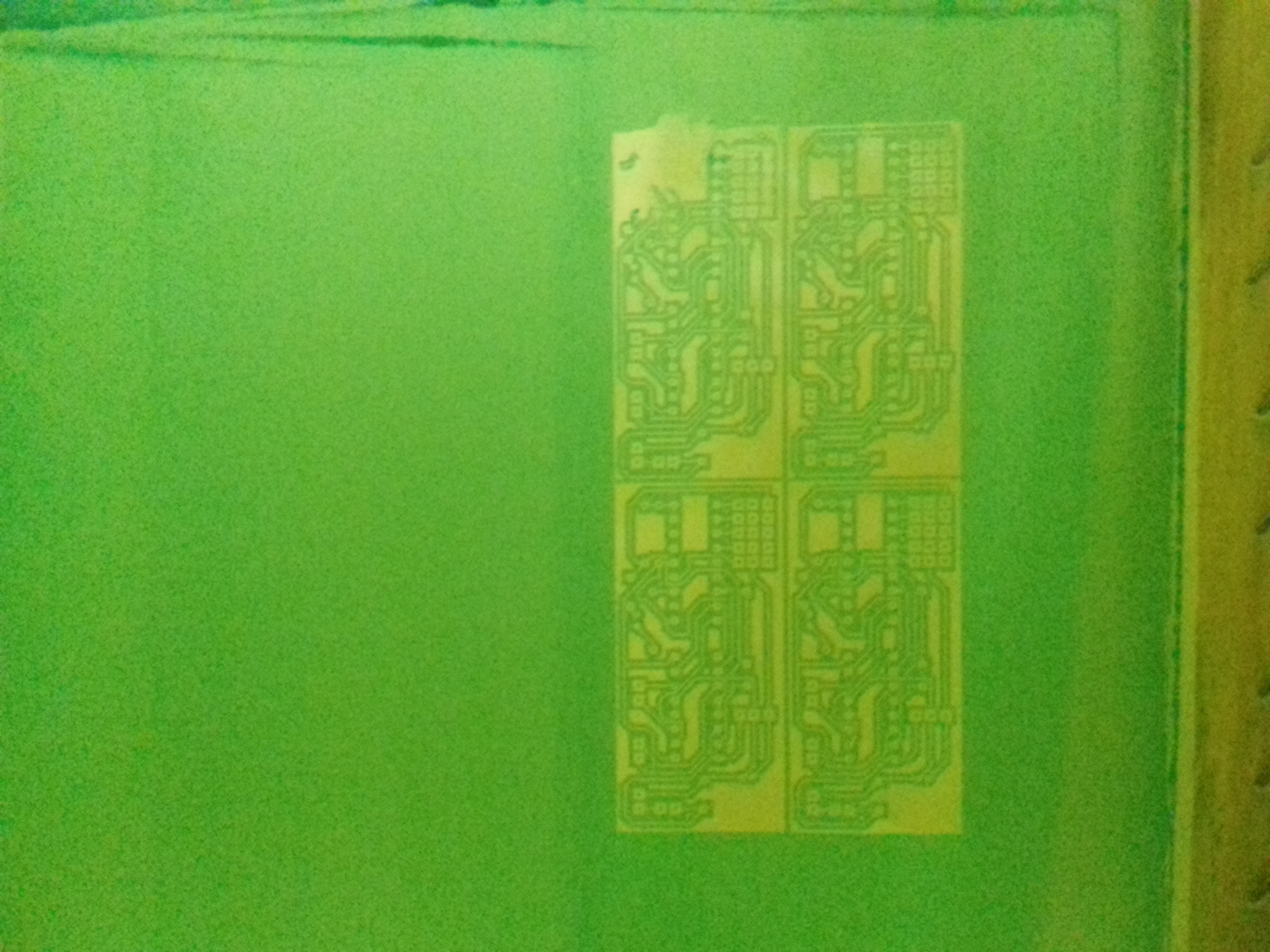
3- The final prototype was made of aluminum with a stainless steel plate, 5 distance sensors and a PCB designed and produced by me.
2

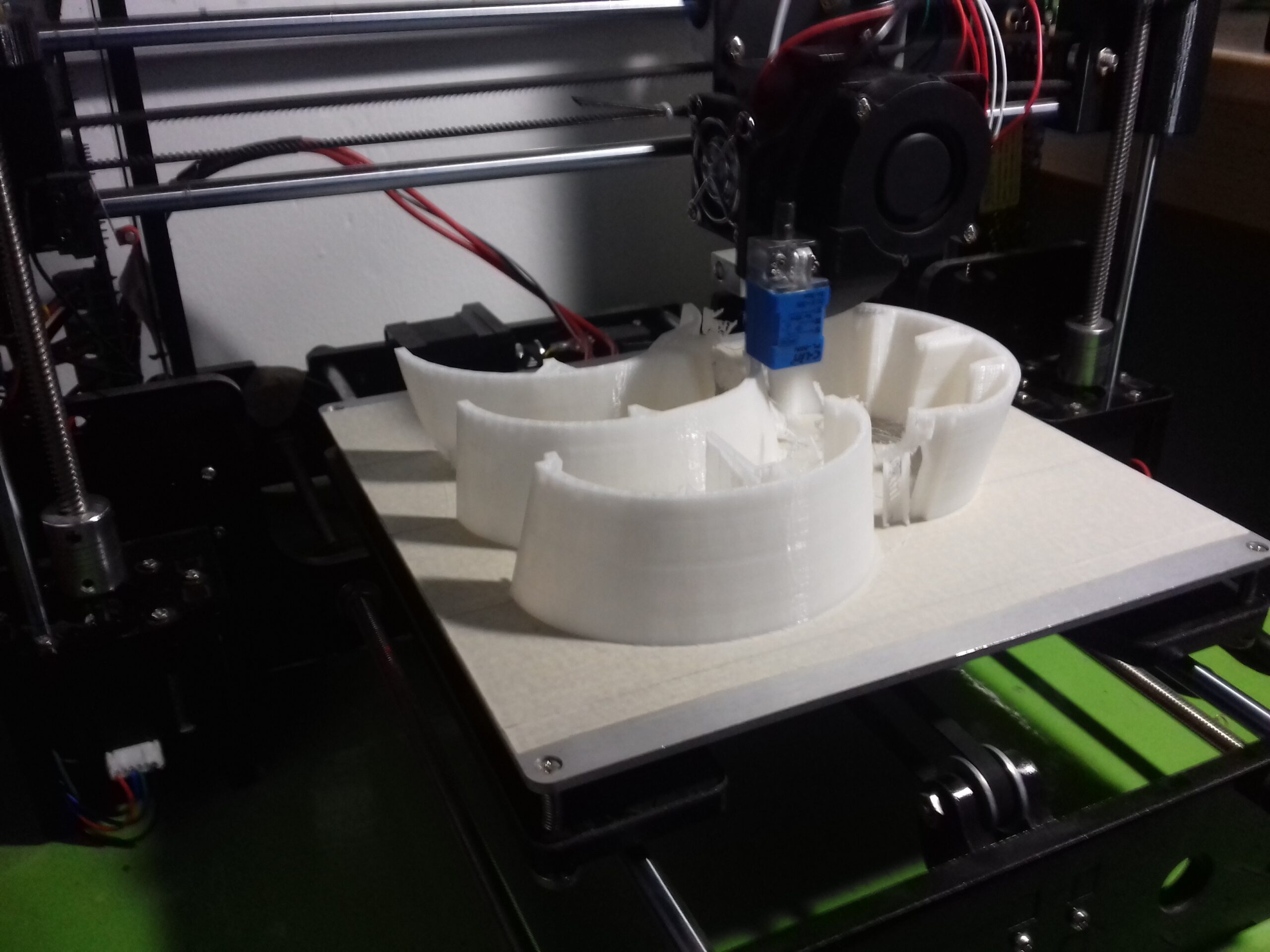
ROBOTIC ARM
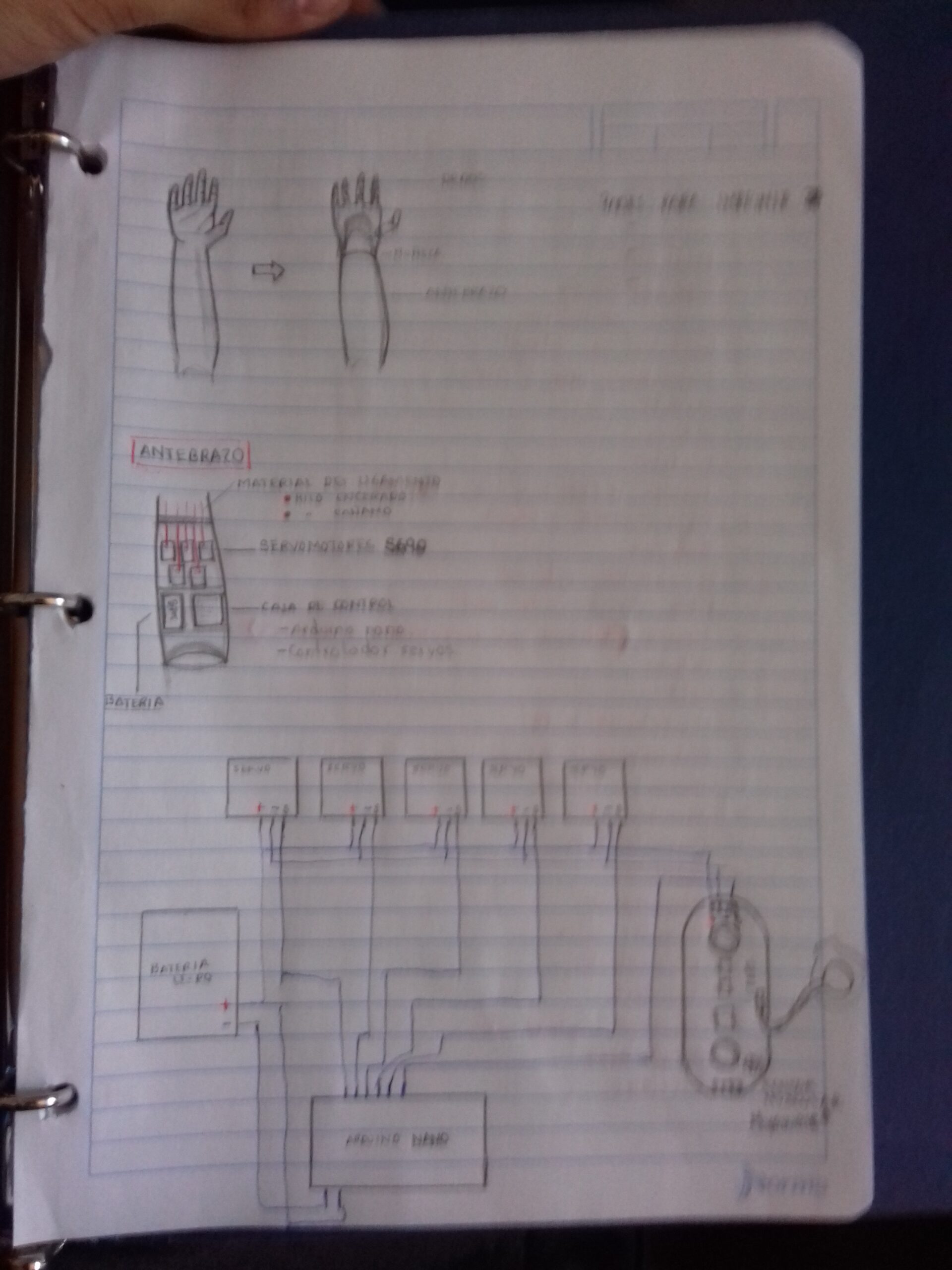
Design of a robotic arm with servo motors controlled by arduino, a project I made for the exhibition of the robotics workshop.
3
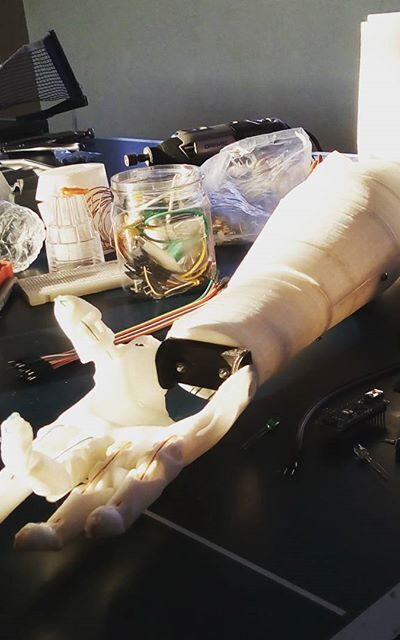
PROSTHESIS – «V1»
The work in prosthetics started thanks to my mom who made a comment to me that I should find a way to help others with robotics.
Thanks to this, I left competition robotics aside and began to focus on this project, having as a priority to offer technology at an affordable price, with an attractive design, version 1 of this arm had:
-5 degrees of freedom.
-Worked by 1 routine: close and open, when 1 pulse from myoelectric sensor was detected.
4
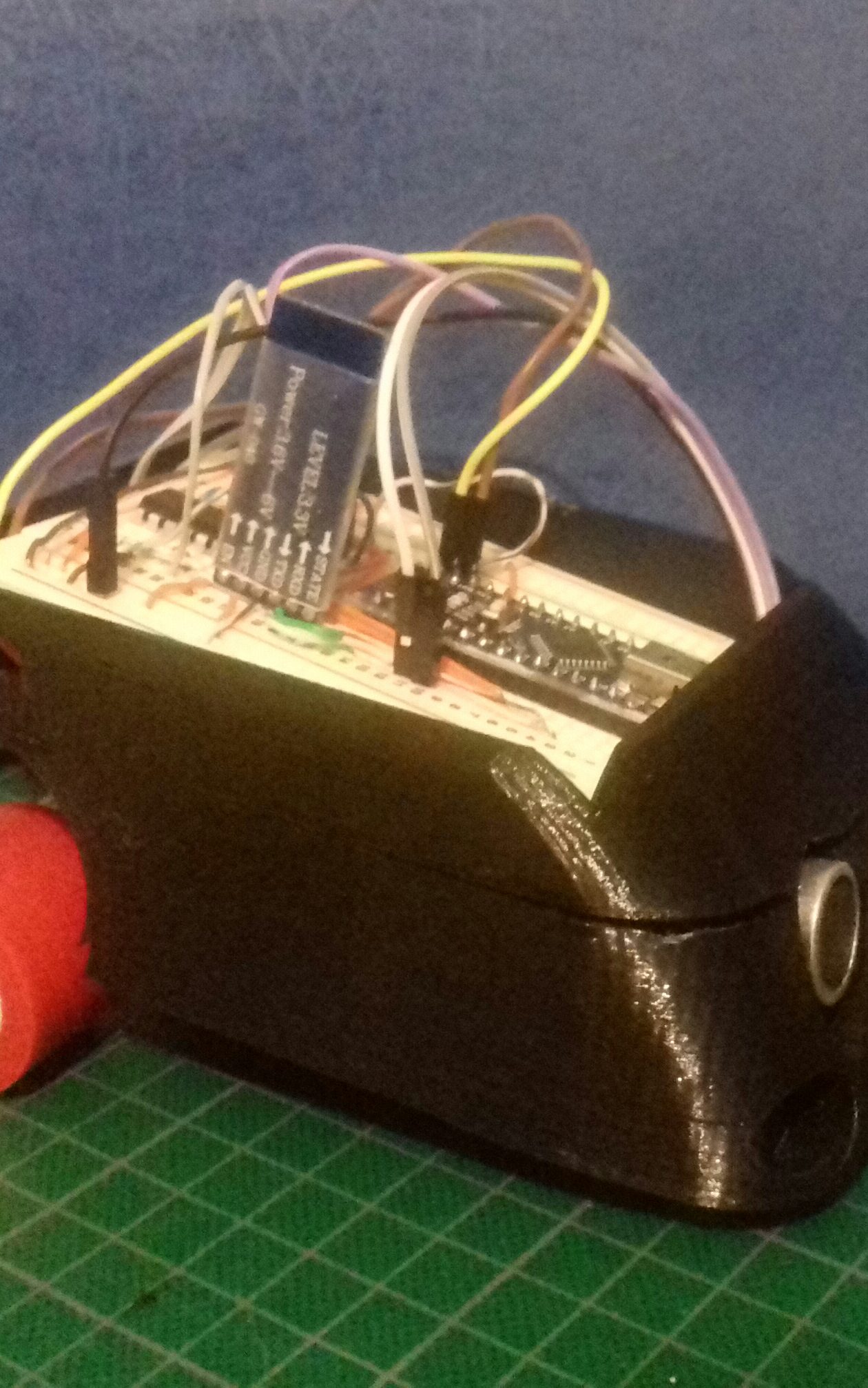
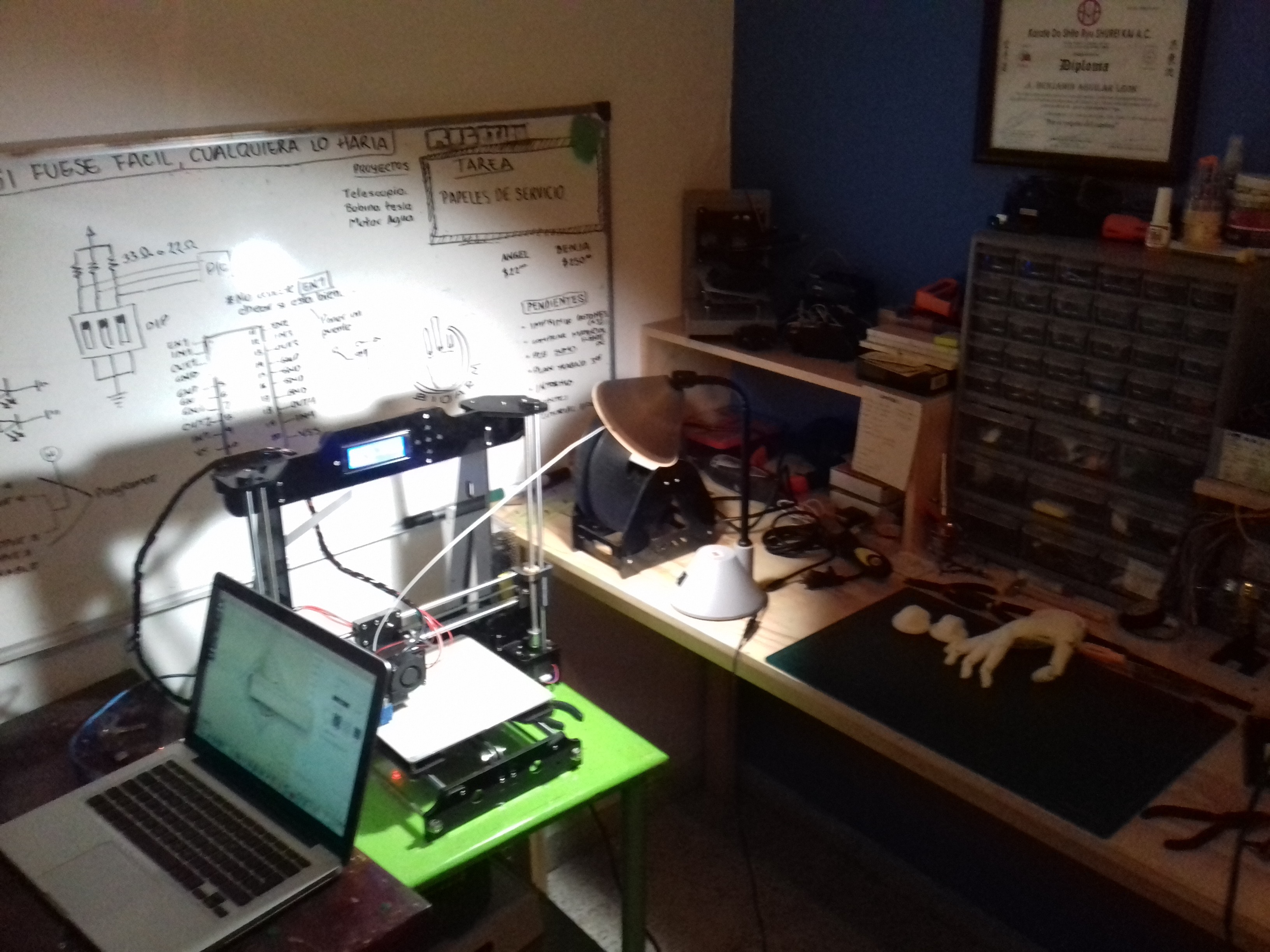
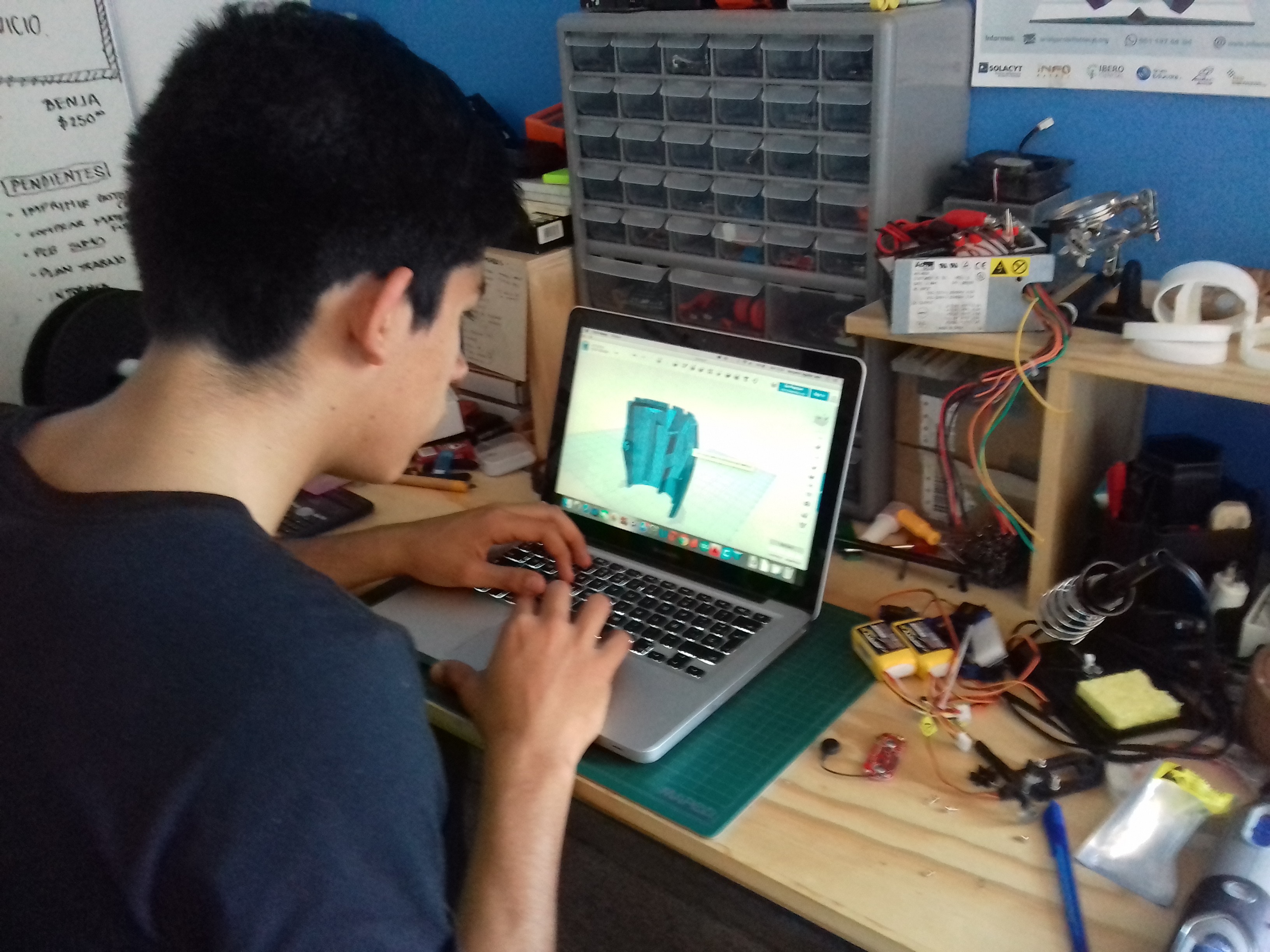
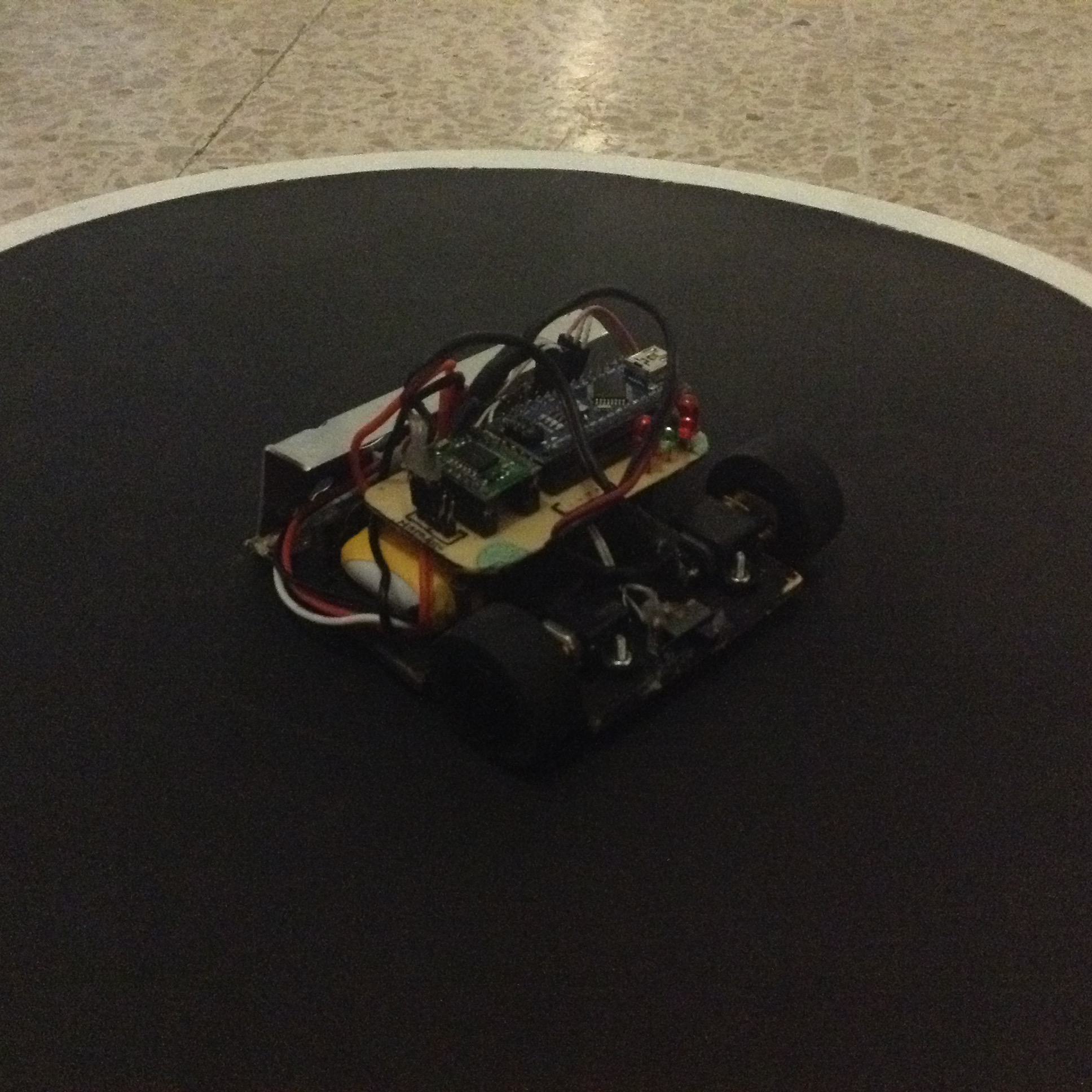
CARRO BLUETOOTH
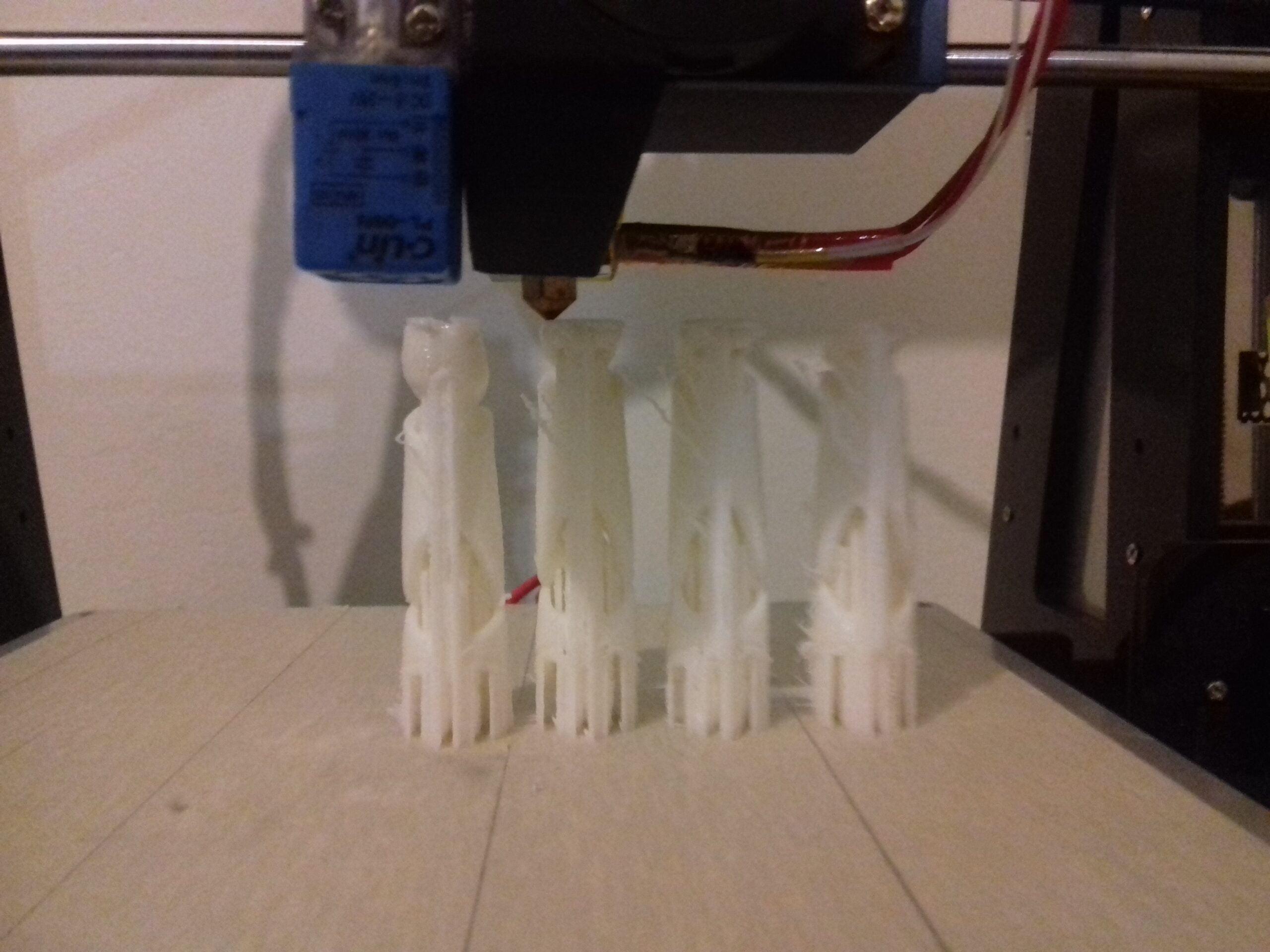
Design of 3D printed structure to place all the components in a presentation that would not use much space despite the fact that it was requested to use a protoboard to mount the robot electronics,
In this project the phone application was also developed.
-Autonomous mode, avoids obstacles thanks to the ultrasonic sensor.
-Remote control mode with app.
5

MESERO – BOT
Project for the humanities subject, we had to design and sell a product, which is why the idea of a robot that could «help» was born, however the robot was very basic, it was more of a mobile model that could be a well developed project.
It had a motor in the head to be able to turn the camera, a space to «refrigerate» objects in the lower part, a tray to carry different things, it could also move forward and take things.
-2 DOF robot arm.
-Moving head.